位置決めしやすいパワーアシストシステムの制御
重量物の運搬などの作業負担を軽減するパワーアシストシステムは,工場や建設現場だけでなく,介護補助などの目的で家庭での利用も注目されています.作業しやすいシステムであるためには人間からみて適切な特性になっている必要があり,機械の特性パラメータを調整するさまざまな手法が検討されています.
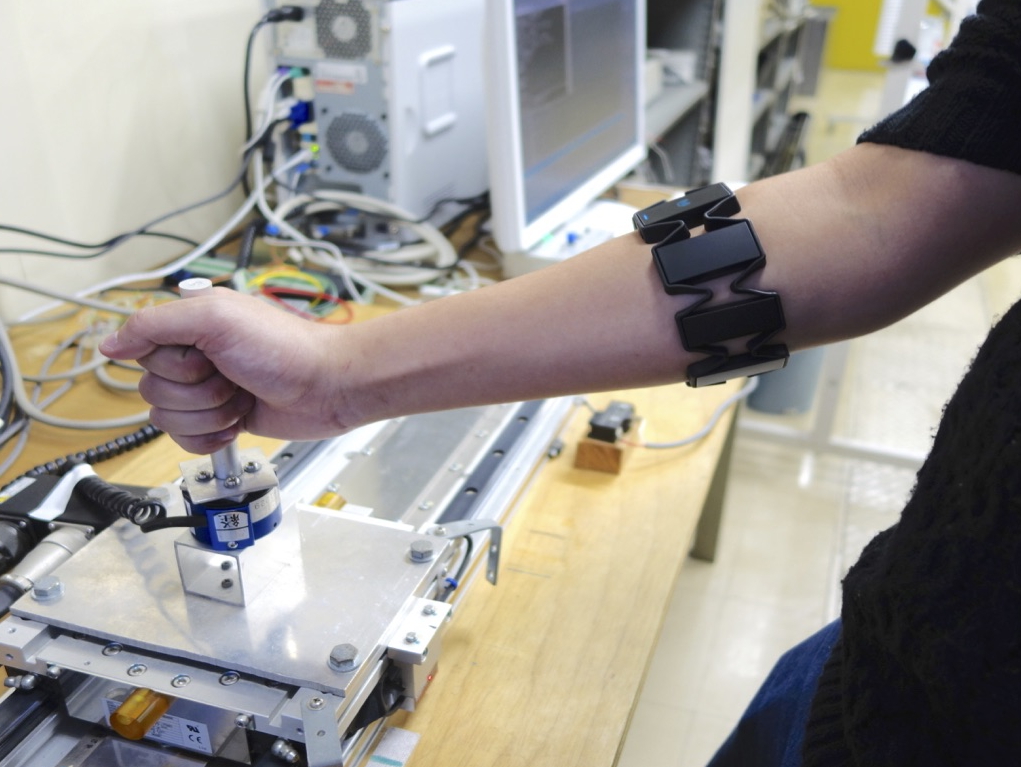
本研究では,手先をある位置で止める位置決め動作において,作業状況や機械の特性に応じて人腕の粘性特性が変化し,その変化のゆるやかさが操作のしやすさと関連していることび注目し,この人腕特性変化の性質を利用してパワーアシストシステムのパラメータを調整する手法について検討しています.
さらに,表面筋電位信号から操作性の高さを評価して,パラメータ調整に利用することも検討しています.