表面筋電位を利用した操作力の能動成分に基づくパワーアシスト制御
従来から検討されている一般的なパワーアシストは,力センサで測定した操作力に基づいて制御されています.しかし,この操作力には操作者が意図的に発生する力だけでなく,人腕の慣性や粘弾性といった受動特性による受動成分が含まれてしまい,操作力をそのままアシストすると操作性を損なう可能性があります.
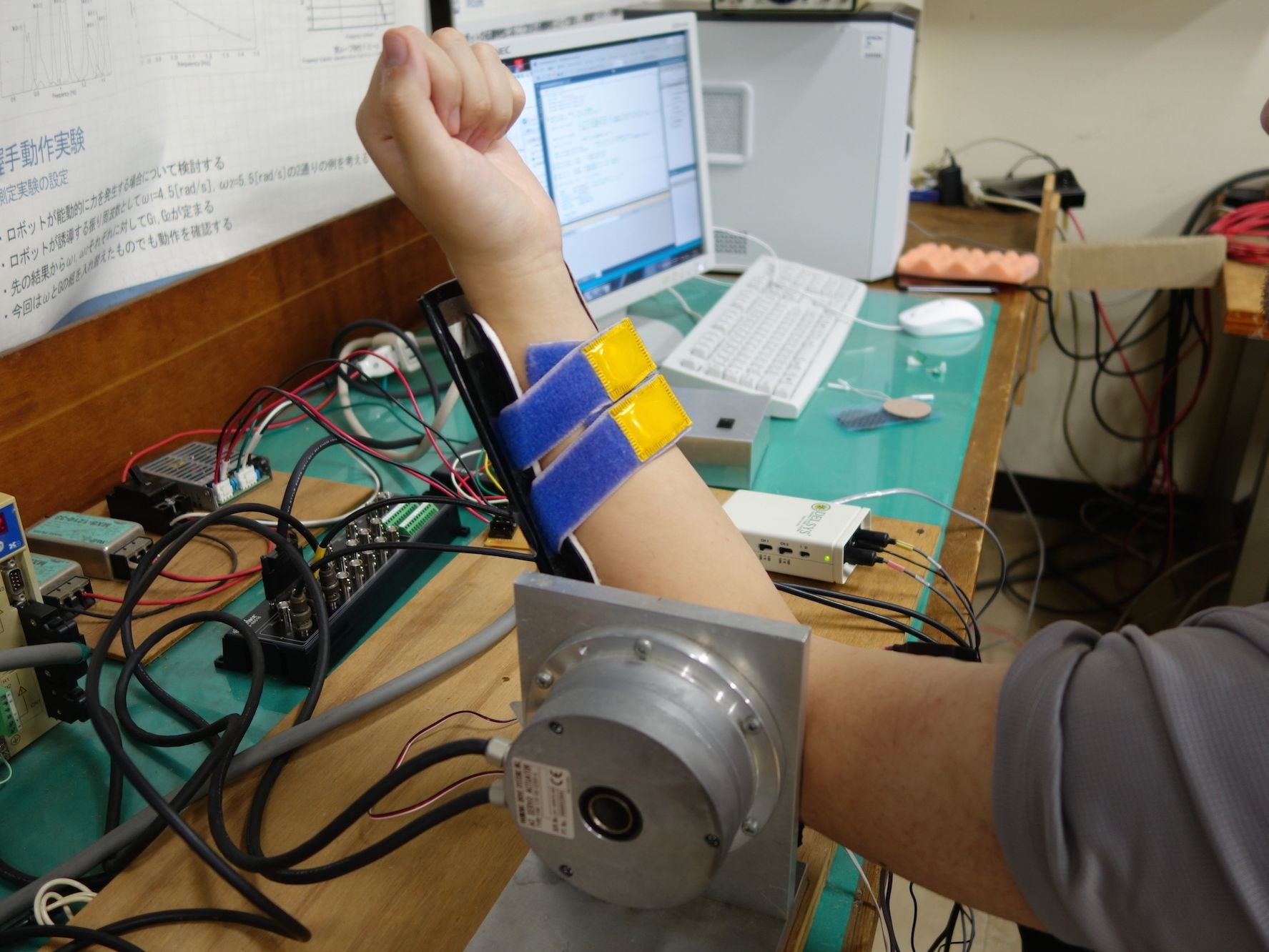
また,体表面から測定できる表面筋電位信号を用いれば,受動成分の影響を受けず,操作者の意図を直接反映した情報が得られますが,力センサに比べて信頼性が低いという問題があります.
本研究では,力センサと表面筋電位信号の両方を利用した操作性の高いアシスト制御を実現する手法を検討しています.